Real derivative controller
Description
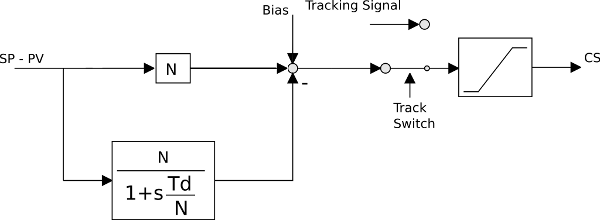
Real derivative controller with Automatic, Tracking mode and
bias signal.
The control law is defined as
sTd
CS(s) = ------------ (SP(s) - PV(S))
1 + sTd/N
Scheme
| Name |
Description |
Conditional? |
| SP |
Set Point |
NO |
| PV |
Process Variable |
NO |
| CS |
Control Signal |
NO |
| TR |
Track Reference signal |
YES (useTS) |
| TS |
Track Switch signal |
YES (useTS) |
| Bias |
Biasing signal |
YES (useBIAS) |
| ATreq |
AutoTuning request |
YES (*) |
(*) AutoTuning Not available here, please see the package
AutoTuning
The controller can have various operating conditions:
In the Automatic mode, the control output is computed with the
integral control law, while in the tracking mode
it is defined by the input TR.
To note that in the tracking mode the output signal CS is equal to
TR.
- Industrial Control Systems (v 1.0.0) : April-May 2012
-
- List of revisions:
-
- 11 May 2012 (author: Marco Bonvini)
- Main Authors:
- Marco Bonvini; <bonvini@elet.polimi.it>
- Alberto Leva <leva@elet.polimi.it>
- Politecnico di Milano
- Dipartimento di Elettronica e Informazione
- Via Ponzio 34/5
- 20133 Milano - ITALIA -
- Copyright:
- Copyright © 2010-2012, Marco Bonvini and Alberto
Leva.
- The IndustrialControlSystems package is free
software; it can be redistributed and/or modified under the terms
of the Modelica license.
Generated at 2026-04-14T18:18:34Z by OpenModelicaOpenModelica 1.26.3 using
GenerateDoc.mos