Proportional controller
Description
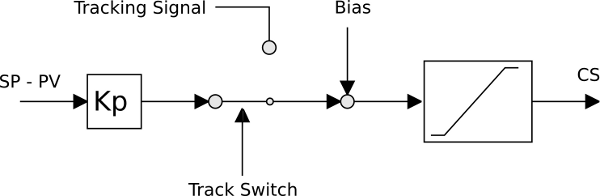
Proportional controller with Automatic, Tracking mode and bias
signal.
The control law is defined as
CS(s) = Kp*(SP(s) - PV(s))
Scheme
| Name |
Description |
Conditional? |
| SP |
Set Point |
NO |
| PV |
Process Variable |
NO |
| CS |
Control Signal |
NO |
| TR |
Track Reference signal |
YES (useTS) |
| TS |
Track Switch signal |
YES (useTS) |
| Bias |
Biasing signal |
YES (useBIAS) |
| ATreq |
AutoTuning request |
YES (*) |
(*) AutoTuning Not available here, please see the package
AutoTuning
The controller can have various operating conditions:
In the Automatic mode, the control output is computed with the
proportional control law, while in the tracking mode
it is defined by the input TR.
- Industrial Control Systems (v 1.0.0) : April-May 2012
-
- List of revisions:
-
- 11 May 2012 (author: Marco Bonvini)
- Main Authors:
- Marco Bonvini; <bonvini@elet.polimi.it>
- Alberto Leva <leva@elet.polimi.it>
- Politecnico di Milano
- Dipartimento di Elettronica e Informazione
- Via Ponzio 34/5
- 20133 Milano - ITALIA -
- Copyright:
- Copyright © 2010-2012, Marco Bonvini and Alberto
Leva.
- The IndustrialControlSystems package is free
software; it can be redistributed and/or modified under the terms
of the Modelica license.
Generated at 2026-04-14T18:18:34Z by OpenModelicaOpenModelica 1.26.3 using
GenerateDoc.mos