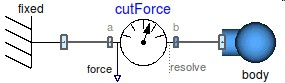
The cut-force acting between the two frames to which this model
is connected, is determined and provided at the output signal
connector force (= frame_a.f). If
parameter positiveSign = false, the negative
cut-force is provided (= frame_b.f).
Via parameter resolveInFrame it is defined, in
which frame the force vector is resolved.
| resolveInFrame = … | Output vector resolved in |
|---|---|
| Types.ResolveInFrameAB.world | world frame |
| Types.ResolveInFrameAB.frame_a | frame_a |
| Types.ResolveInFrameAB.frame_b | frame_b |
| Types.ResolveInFrameAB.frame_resolve | frame_resolve (must be connected) |
If resolveInFrame =
Types.ResolveInFrameAB.frame_resolve, the conditional
connector frame_resolve is enabled and output
force is resolved in the frame, to which
frame_resolve is connected. Note, if this connector is
enabled, it must be connected.
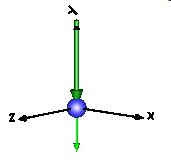
In the following figure the modeling and animation of this sensor is shown.
![]() Developed 2010 at the DLR Institute of System
Dynamics and Control
Developed 2010 at the DLR Institute of System
Dynamics and Control